The benefits of this approach include:
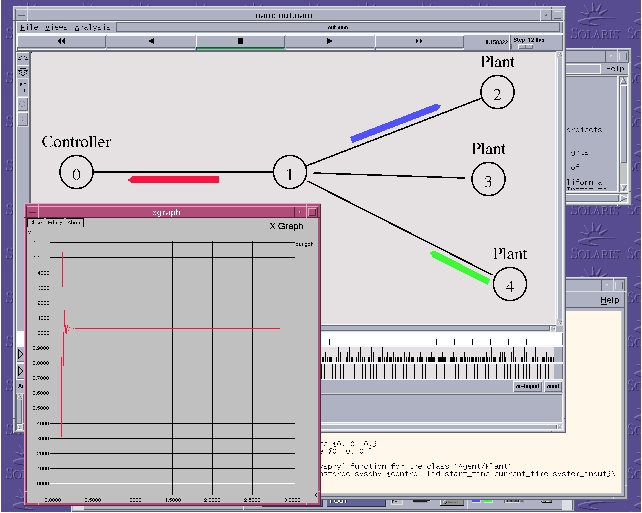
The figure shows a snapshot of our current software. The window on
the
bottom left corner is a live WebCam view of the robot work space. The
top
window enables an end-user to directly tele-operate the robot through
mouse
movements a keyboard strokes. The bottom right windows enable the
creation
of new mobile agents by directly instantiating the definitions
contained
in appropriate Java class files. This GUI also allows the logical
interconnection
of such agents in a hierarchical structure.
| Faculty
Prof. Vincenzo
Liberatore |
Students
Ahmad
Al-Hammouri |
Alumni |

The ParaDex is the main robot that we use as our testbed. It is quite a unique facility: designed and built by MicroDexterity Systems, Inc, in collaboration with Sandia National Laboratories. This closed-chain manipulator has demonstrated outstanding responsiveness in contact tasks, due to low motor inertia and low Coulomb friction, in spite of a relatively large payload capacity. It is controlled by an open-architecture platform based on the QNX real-time operating system. Under separate programs, CAISR researchers have developed Natural Admittance Controllers for all three of these robots, with high-bandwidth feedback via JRRR and ATI force/torque sensors. These machines have demonstrated world-leading compliant-motion behavior for mechanical assembly applications. They will be uniquely valuable as prototypes of future service robots capable of gentle manipulation of their environments.
| Date |
Entry |
| April 25, 2015
|
ACC 2015 added. |
| April 2, 2015
|
playback-ruby v1.0 added. |
| June 8, 2009
|
HSCC paper added. |
| May 13, 2009
|
Added a CPS Workshop paper. (I am back! ... or will be soon) |
| November 4, 2007
|
Added the Sensys poster. |
| September 3, 2007
|
Sensys demo abstract and SpaceOps paper added. |
| July 13, 2007
|
A narrated presentation on networked power grids has been added. |
| July 5, 2007
|
Added a pointer to Space Operations Communicator, and to Graham's thesis. I also added a co-simulation video with modelica and ns2. |
| April 20, 2007
|
Added talks at NETL. |
| April 14, 2007
|
Added NEONet papers. |
| March 28, 2007
|
Support from Lockheed is now acknowledged. |
| February 14, 2007
|
Vincenzo was in Vegas, and lost all of his money. Good news: he gave 2 talks, and they are now posted here. He also acknowledges the support of Ohio ICE. |
| January 13, 2007
|
Added MobiSensors paper. |
| December 15, 2007
|
WCSSE funded by the State of Ohio. |
| November 14, 2006
|
Added OhioICE paper. |
| October 5, 2006
|
Linked to Team Case (Darpa Urban Challenge) |
| September 28, 2006
|
Added slides of talk at KSU. |
| September 24, 2006
|
Added NSF CPS paper. |
| August 29, 2006
|
ISeB link updated. |
| August 7, 2006
|
NSF CPS slides added. I have also added my slides of the SMC-IT 2006 talk. |
| July 14, 2006
|
Vincenzo has joined the ISA SP-100 committee and put a link on this page. |
| July 5, 2006
|
PTPd paper. |
| July 2, 2006
|
Slides and pictures of Ahmad from FeBID 2006. |
| July 1, 2006
|
Slides and pictures of Ahmad from WPDRTS 2006. |
| June 12, 2006
|
Link to the ISeB paper. |
| June 10, 2006
|
Posted a revised version of the WPDRTS paper. |
| May 23, 2006
|
Added the SMC-IT 2006 paper. |
| May 14, 2006
|
Added a pointer to the SIGBED review paper. |
| March 21, 2006
|
NEONet 2006 pictures posted. |
| March 19, 2006
|
The FeBID paper is now posted. |
| March 1, 2006
|
NEONet 2006. |
| February 13, 2006
|
Added the presentation at SUNY Stony Brook. |
| January 29, 2006
|
Added the WPDRTS 2006 papers, the talk at the Innovation Summit, and a link to NEONet. |
| January 15, 2006
|
Added the abstract for the Workshop on Theory of Networked Computation. |
| January 5, 2006
|
Added the historical technical report from U. Lund. Added also the much more recent Infocom paper. |
| December 17, 2005
|
Updated the Web site of the OhioICE Research Workshop. |
| November 16, 2005
|
Added printed version of the EJC paper and the Call for Participation of the OhioICE Research Workshop. |
| October 20, 2005
|
Link to ptpd added. |
| September 2, 2005 | Pictures from Sigcomm 2005 added. |
| August
10, 2005 |
I have added a pointer to the Wikipedia NCS entry. |
| June
30, 2005 |
I have added the paper and the
slides for the INSS 2005 paper. |
| June
22, 2005 |
Zak's homepage updated. |
| June
17, 2005 |
EESR and ACC slides added. Zak's
research site added. SFQ paper added. |
| June
9, 2005 |
Justin presented his paper at
ACC 2005. |
| June
5, 2005 |
Ahmad gave his talk at EESR 2005
and Vincenzo was in the final panel on sense-and-respond research. |
| May
25, 2005 |
I added the link to Zak's Web
page. |
| May
11, 2005 |
For some reason, I had never
added the APIO slides, but here they are. And, congratulations to
Ahmad, who just got a travel grant to present his paper at EESR! |
| May
10, 2005 |
Justin was back and practiced
his ACC talk in front of us and of a standing telephone headset (Steve). |
| May
9, 2005 |
I have corrected the conference
name to EESR, and also posted our comments to appear on the European
Journal of Control. |
| May
6, 2005 |
ESSR paper posted. |
| April
26, 2005 |
Wide area emulator howto
document
has been added.
|
| April
20, 2005 |
The presentation on IP-over-USB
has been added.
|
| April
17, 2005 |
The final project report on
IP-over-USB
has been added.
|
| March
10, 2005 |
Pointer to GiPSi added.
|
| March
9, 2005 |
Infocom Student poster has been
added.
|
| March
7, 2005 |
REU
advertised.
Papers at ACC 05 and at the Infocom Student Workshop added.
|
| February
28, 2005 |
Paper, software, and
documentation on
play-back algorithms added.
|
| February
23, 2005 |
We now have an account and a
Linux machine at Arizona State University for distributed
experimentation.
|
| February
17, 2005 |
Ben's design of an IP/USB bridge
posted.
|
| January
11, 2005 |
Everybody's back: first meeting
after Winter Break.
|
| November
29, 2004 |
Final version of ISeB paper sent
out. Two white papers added. "Network" changed to "Networked" in this
site. |
| November
19, 2004 |
NetBots to help out with Space
IP. Details to follow in the next few months. |
| October
19, 2004 |
Nathan has his own research
WebLog up and running too. |
| October
12, 2004 |
Mobile Wireless Tracking project
has been posted, with Phillips' blessings. Steve and his students are
already working
hard on the hardware (MEMS mirror) component. |
| October
7, 2004 |
Ahmad has started a WebLog with
his current results, charts, and other research results. |
| October
4, 2004 |
NetBots to help out with
GiPSiNet. Details to follow in the next few months. |
| September
28, 2004 |
A discussion has started
regarding facilities and office space for students. Things will
probably move slowly but hopefully for the (much) better. |
| September
22, 2004 |
WFCS talk slides added to the
Web site. |
| September
3, 2004 |
FES planning meeting. |
| September
1, 2004 |
Vincenzo has summarized his
IWQoS paper at the Networks Chat. |
| August
31, 2004 |
Huthaifa is back from vacation:
welcome back! |
| August
27, 2004 |
Ahmad has passed his qualifier
exam: congratulations! |
| August
24, 2004 |
The weekly meeting is now on
Tuesday for the rest of the semester. Ahmad and Nathan will alternate
in taking and posting meeting notes. |
| August
24, 2004 |
White paper on NASA robotic
networks has been posted. |
| August
19, 2004 |
A new version of ncs.tar with a
bug fix
has been posted, with thanks to Ahmad. |
| August
17, 2004 |
The Web page for the Networks Chat has been updated and the
presentations at Ohio ICE and at Simon Frazer have been posted. |
| August
6, 2004 |
Vincenzo gave a talk at Simon
Frazer Univrsity in Vancouver, British Columbia. |
| July
19, 2004 |
Another long and useful
discussion on open problems. |
| July
8, 2004 |
I have added a draft, traces,
and
scripts on contingency control. I have also added a link to a paper on
time-scales. |
| July
2, 2004 |
WFCS paper added. Case is
featured
in the Ohio ICE partner spotlight. |
| July
1, 2004 |
Long meeting on open resesarch
issues. |
| June
26, 2004 |
Pointer to fping has been added |
| June
25, 2004 |
Huthaifa has passed his
qualifier exam: congratulations! |
| June
18, 2004 |
Justin's gone, but Nathan has
joined the NCS weekly meeting. |
| June
16, 2004 |
I added a picture from IWQoS
2004. |
| June
12, 2004 |
Justin's defense and
undergraduate concentration areas added. |
| June
6, 2004 |
IWQoS talk slides added. |
| May
27, 2004 |
Justin's defended his thesis:
congratulations! |
| May
20, 2004 |
Added a NASA white paper and
(how did I miss this?) Ahmad's thesis. |
| May
17, 2004 |
The NCS Web site has been
announced with a mass e-mail. |
| May
16, 2004 |
Commencement and graduation at
Case. |
| May
14, 2004 |
No meeting today, but Vincenzo
gave a talk to NASA and added his slides here. |
| May
3, 2004 |
The Virtual World initiative has
been unveiled! More details to follow. |
| April
20, 2004 |
Added links to IWQoS paper and
Ohio ICE. |
| April
3, 2004 |
The ShowCase was a great
success! Pictures from the event added. |
| March
27, 2004 |
More pictures and animations
added |
| March
26, 2004 |
A guest today: Shiva Sastry from Akron. |
| March
26, 2004 |
A nam animation of Agent/Plant has been added. |
| March
17, 2004 |
John's done! His thesis and
presentation have been added. |
| March
11, 2004 |
ABB talk (QoS) added. |
| March
2, 2004 |
ShowCase poster added. |
| February
29, 2004 |
Yes, Vincenzo was at work on a
leap day!!! and added students mug shots and the NCS link. |
| February
9, 2004 |
Pointers added to the Web site
or pictures of most students. |
| February
6, 2004 |
First plenary meeting at Case
(Steve was missing), with excellent interaction among all of the
different subprojects. |
| February
4, 2004 |
Web page updated. NCS Web page
planned. |
| February
2, 2004 |
This Web page has been updated
with a lot of content that has appeared since the last revision. A
regular group meeting has been scheduled. |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}